Core Lecture 2 Sample-based Approximations and Fitted Learning -- Rocky Duan
Reinforcement Learning is interesting!

一、Sampling-Based Approximation
本篇文章主要研究基于采样的估计行为,作为一种统计意义上的操作,采样被普遍认为是机器学习中相当有用模拟统计量的一个手段,无论是在路径规划还是在什么一些别的领域,sample都是非常有用的~
1. 回顾一下
对于最优Q函数,其也满足相应的Bellman Equation:
和价值迭代方法完全类似,我们可以采用Q-value
Iteration的方法来进行迭代,对model已知的,确定的离散环境(state和action取值集合都是离散的,例如Gridworld游戏),求出所有的Q函数值来,这样的话最优策略
不过正如上一篇文章中最后所描述的那样,这种价值迭代(包括上次提到的策略迭代)方法存在着两个致命的缺陷,其中第一个就是需要对环境模型已知,也就是说对所有的
2. Tabular Q-Learning
Tabular Q-Learning,指的是“列成表的Q-Learning”,即将所有可能的Q函数值全部都存在一张表里,当学习过程完成之后,在进行策略选择时只需要通过查表+比较的方法即可非常方便确定动作的选择,毫无疑问这种方法是非常明确的,但是效率和成本限制了其的应用,这一点到后边再谈。Tabular Q-Learning使用采样的方法,对模型未知的情况进行处理,也就是说这是一种Model-Free的算法。
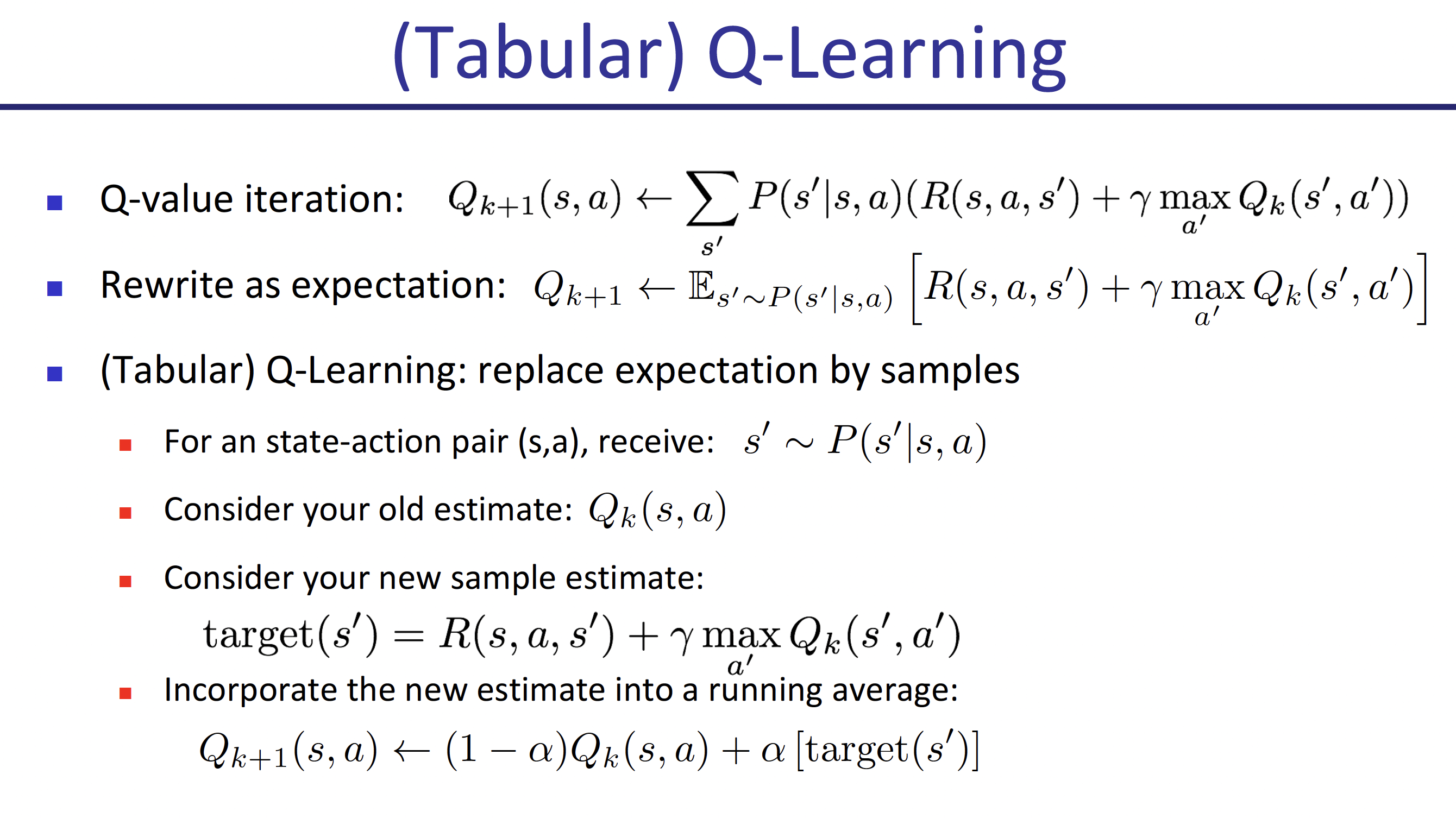
上图展示了这种学习方法的一个过程,首先和普通Q-Learning完全类似进行迭代,但是由于model-free,这里采用采样求期望的方法替代P(s'|s,
a)。在具体操作上,我们进行多次采样,每次采样后都使用本次采样的结果对Q函数进行更新,由于Q函数函数值代表着当前状态s和动作选择a组合对应的奖励值,每次采样获得的都是对这一值的使用
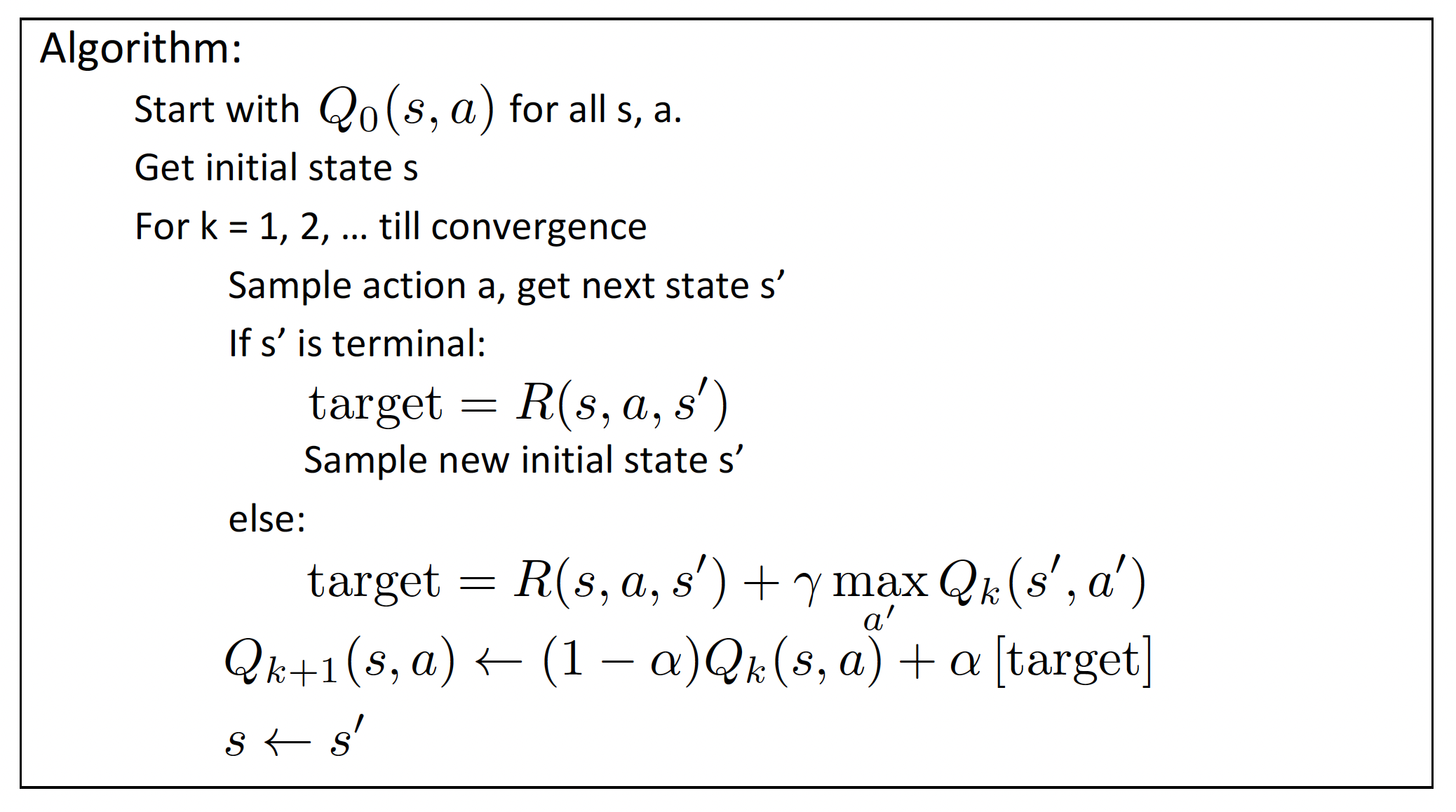 正如左图展示的那样,该算法同样从k=0开始迭代。不过个人认为左图可能有点错误,即应该在target计算的时候需要注意区分
正如左图展示的那样,该算法同样从k=0开始迭代。不过个人认为左图可能有点错误,即应该在target计算的时候需要注意区分
需要注意的是,这个学习过程中存在两次“采样”。第一次是给定s,采样获得a,之后进行动作;第二次是给定s和a,提交给环境后环境进行反馈得到一个s‘。第二次体现了这个学习过程的model-free性质,第一次则是需要重点考虑的。给定s选择a,这正是策略
在这里进行一组概念的区分:off-policy和on-policy
- off-policy:学习过程中每次训练选择action的policy和最终期望训练的(用来更新Q函数,即在target式子当中和s‘状态组合的action采用的选择方法)那个policy不同,例如刚才分析的Tabular
Q-Learning算法,选择action采用的是
的,因此两个policy不同,为off-policy方法 - on-policy:学习过程中每次训练选择action的policy和最终期望训练的(用来更新Q函数,即在target式子当中和s‘状态组合的action采用的选择方法)那个policy相同,例如SARSA算法,和Q-Learning基本完全类似,但是在更新Q函数计算target的时候采用同样的
方法计算a‘,与选择a的policy相同,因此其为on-policy方法
3.Value Iteration,Policy Iteration的Sampling-Based方法
(1)Value Iteration
首先回顾一下value iteration的迭代方法
但是如何通过在未知模型的情况下,通过采样的方式确定max值,目前仍然没有办法,所以这个问题暂时搁置
(2)Policy Iteration
首先回顾一下policy iteration的算法过程
首先通过迭代至收敛完成policy evaluation,获得该策略下的状态价值函数V,迭代过程如下
之后在进行一次策略迭代更新
将以上过程循环,直至收敛,具体来说,策略迭代更新就是采用"one-step-look-ahead"的方法选择动作,但是和Value Iteration类似,目前我们没有办法通过采样处理确定max值
二、Function Fitting
以上提到的sampling-based方法,解决了文章开头提到的初始版本价值迭代/策略迭代的第一个缺陷(对model的要求),接下来我们尝试处理第二个缺陷,即需要记录所有情况的价值函数值,不仅只能处理离散的状态-动作空间,而且存储成本巨大。
我们采用的方法是"Generalizing Across States",即对状态进行归纳整合。我们讨论Q-Learning的情况,基础版本的Q-Learning需要存储所有状态-动作的q函数值在一个表格当中(tabular Q-Learning),但是在许多(尤其是连续空间)情况下这是不可能实现的。我们期望达到的目标是:通过学习少量(相比于连续空间的海量)样本,获得的策略能够推广至没学过但相似的情况仍然有效,这实际上是机器学习的一个很基本的想法。为了初步实现这种想法,我们引入了Approximate Q-Learning算法。
1. Approximate Q-Learning
与tabular Q-Learning相比,Approximate
Q-Learning通过将Q函数参数化来进行简化和估计,以线性为例,原先我们需要存储表格记录下所有的Q函数取值情况,现在我们只需要根据已知的n个线性函数
在进行Q-Learning的时候,target始终是非常重要的一个量。作为对当前状态s和采取动作a组合下获得奖励大小的最新估计,我们每次的学习都是希望Q(s,
a)能够距离target更近一点,为此在Q-Learning中我们采用了引入学习率
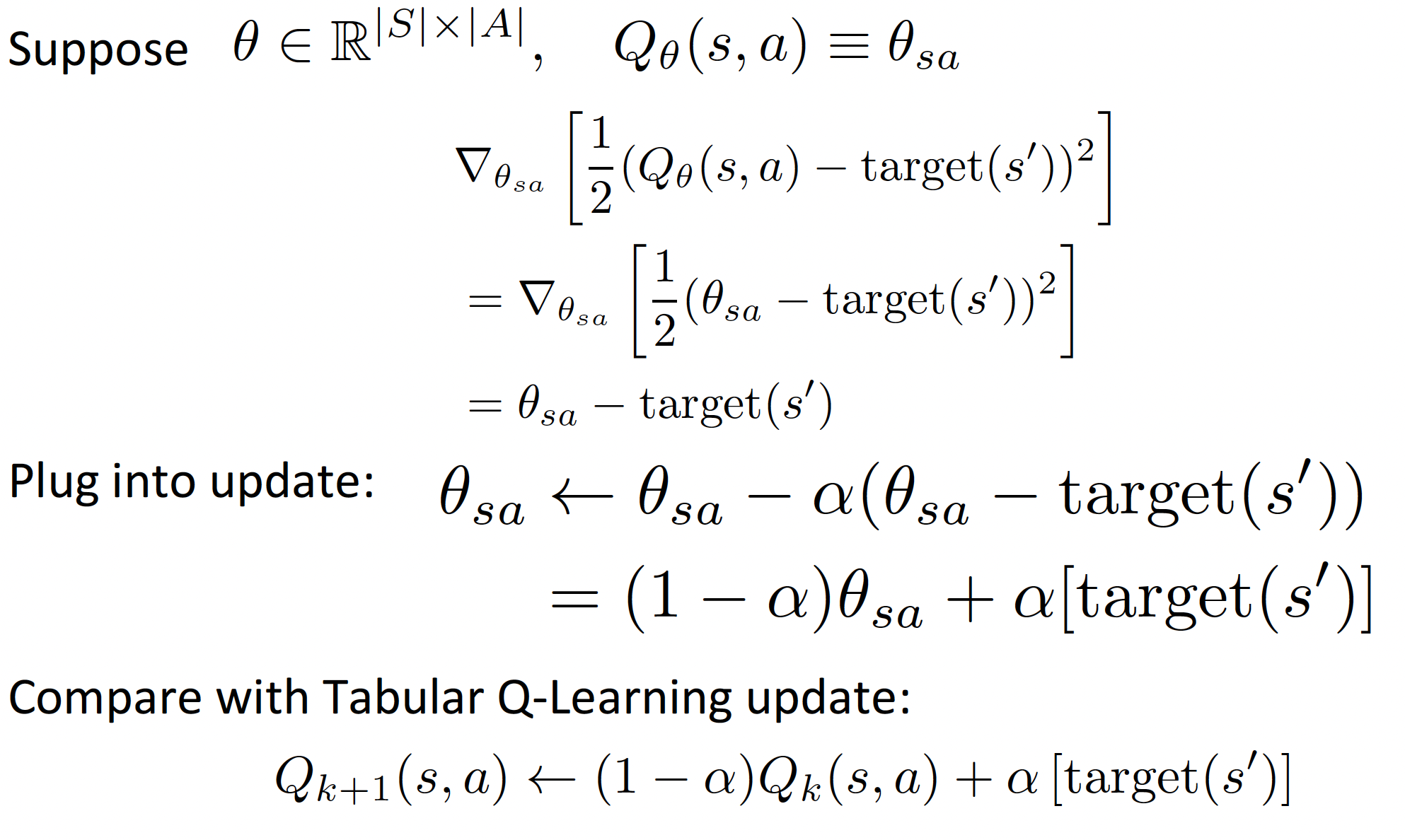 事实上,以上形式的线性Approximate Q-Learning和Tabular Q-Learning存在着联系,或者说Tabular Q-Learning就是Approximate
Q-Learning的一个特殊情况。正如左边所示,即取
事实上,以上形式的线性Approximate Q-Learning和Tabular Q-Learning存在着联系,或者说Tabular Q-Learning就是Approximate
Q-Learning的一个特殊情况。正如左边所示,即取
将这种Approximate Q-Learning的方法进一步发展,由于我们很难选用合适的函数去拟合表示Q函数,可以采用神经网络的方式去替代Q函数,其参数就是网络的权重,以此获得参数化的效果,具体将在下一篇中具体论述,也就是大名鼎鼎的DQN算法。